경량 패턴
- 어떤 객체의 수가 너무 많아 이를 가볍게 만들고 싶을 때 사용한다
- 데이터 중 공유 데이터를 고유 상태 intrinsic state나 자유문맥 context-free라 한다
- 나머지 데이터를 인스턴스 별로 값이 다른 외부 상태 extrinsic state라 한다
- GoF 패턴 중 유일하게 하드웨어가 지원하는 패턴이다
경량 패턴의 목표는 최적화
- 경량 패턴을 통해서 클래스 정의 개수를 줄이는 것이 제 1 목표이다
- 메모리 공유는 덤이다
첫번째 예제
- 공유할 수 있는 데이터를 하나의 객체, 즉 공유 객체로 통합해서 관리
- 각 인스턴스는 공유 객체를 참조하기만 하고 상태 값은 인스턴스에 저장
// 수 많은 나무를 렌더링 하기 위해 나무의 클래스를 정의
// 공유 객체를 통해 중복 데이터를 참조하도록 한다
class TreeModel
{
private:
Mesh mesh_;
Texture bark_;
Texture leaves_;
}
// 각 인스턴스
class Tree
{
private:
TreeModel* model_;
Vector position_;
double height_;
double thickness_;
Color barkTint_;
Color leafTint_;
}
인스턴스
- 주메모리에 객체를 저장하기 위해 위의 패턴은 충분
- 그러나 GPU가 렌더링 하기 위해 사용할 버스는 여전히 부담
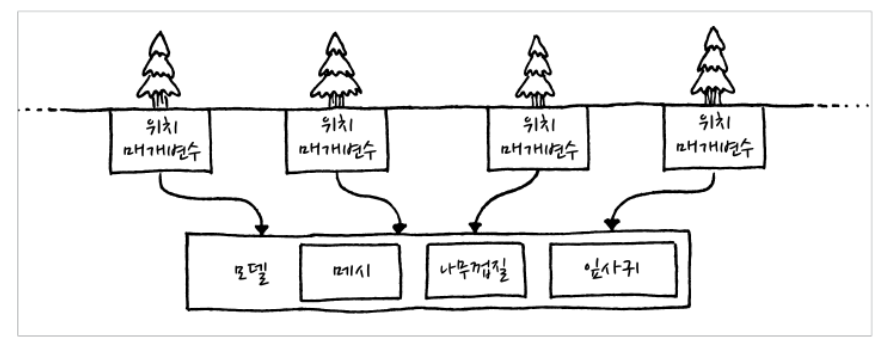
- Instance Rendering을 통해 그래픽카드나 API가 공유 데이터 사용하도록 지원
- 공유 데이터를 딱 한 번만 CPU에서 GPU로 전송
- 두 개의 데이터 스트림을 통해 각각 공유 객체와 인스턴스 목록 + 매개변수들이 전송
- 이 예제는 메모리 크기보다는 전송 시간이 더 중요
- 그러나 이 문제를 해결하기 위한 방법이 경량 패턴과 동일
두번째 예제
- 그리드 기반의 World와 이를 구성하는 Terrain을 만들고자 한다
- 2x2 array를 모두 Terrain 객체 데이터로 채우는 짓은 하지 않는다
// 지형 클래스
class Terrain
{
public:
Terrain (int movementConst, bool isWater, Texture tex)
: movementConst_(movementConst),
isWater_(isWater_),
tex_(tex)
int getMovementConst() const { return movementConst_;}
bool isWater() const { return isWater_; }
const Texture& getTexture() const { return tex; }
private:
int movementConst_;
bool isWater_;
Texture tex_;
}
// World 클래스
class World
{
public:
World()
: grassTerrain_(1, false, GRASS_TEXTURE),
grassTerrain_(1, false, GRASS_TEXTURE),
grassTerrain_(1, false, GRASS_TEXTURE) {}
private:
Terrain* terrain_[WDITH][HEIGHT];
Terrain grassTerrain_;
Terrain hillTerrain_;
Terrain riverTerrain_;
// 지향을 생성하는 함수
void generateTerrain()
{
// ...
}
// ...
}
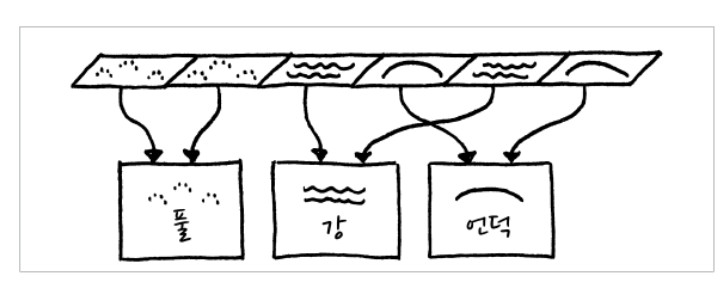
- 이로써 World의 Terrain은 3개의 공유 데이터를 Terrain 인스턴스 포인터가 가리키면서 이루어진다
- Life cycle 관리를 위해 3개의 공유 데이터는 World에 저장한다
성능
- 포인터를 통한 접근은 캐시 미스를 유발할 수 있어 성능 면에서 조금 부족한 건 사실이다
- 메모리에 객체가 배치되는 구조에 따라 퍼포먼스는 달라질 수 있다
- 애매하면 두 방법 모두 측정한 뒤 결정하라
- 프로파일링을 해본 뒤 하드코딩을 해도 늦지 않다
- 객체 복사를 줄이면서도 객체 지향 방식을 추구할 수 있다