Path-Finding
공간 분할의 타입
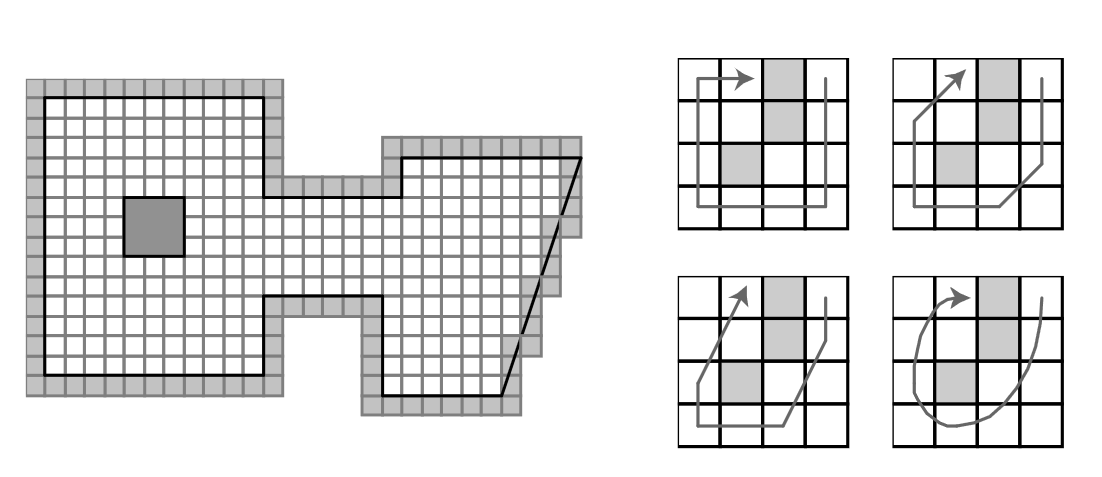
Grid
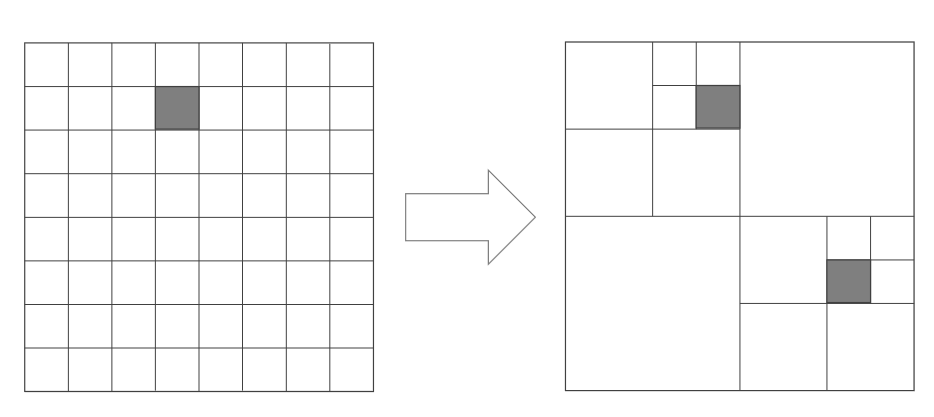
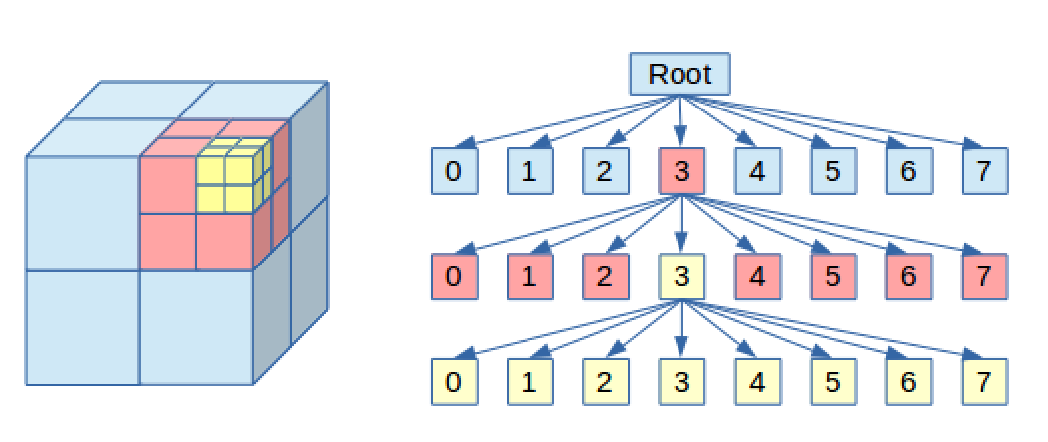
QuadTree/OctTree
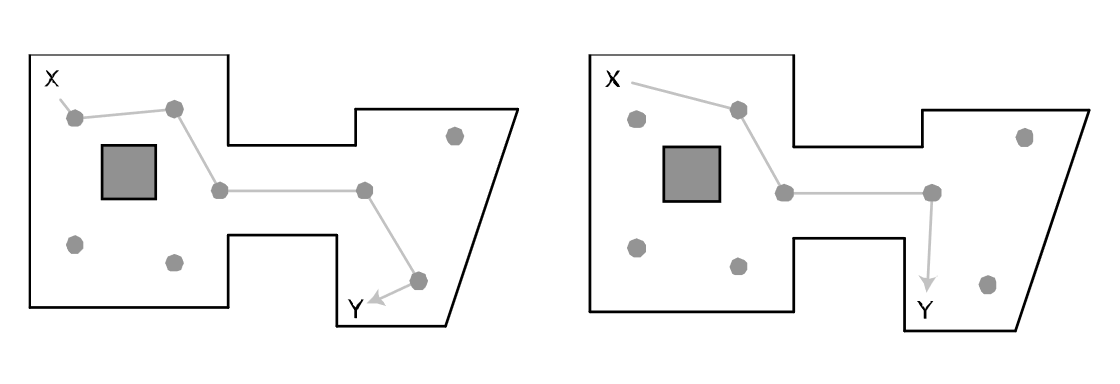
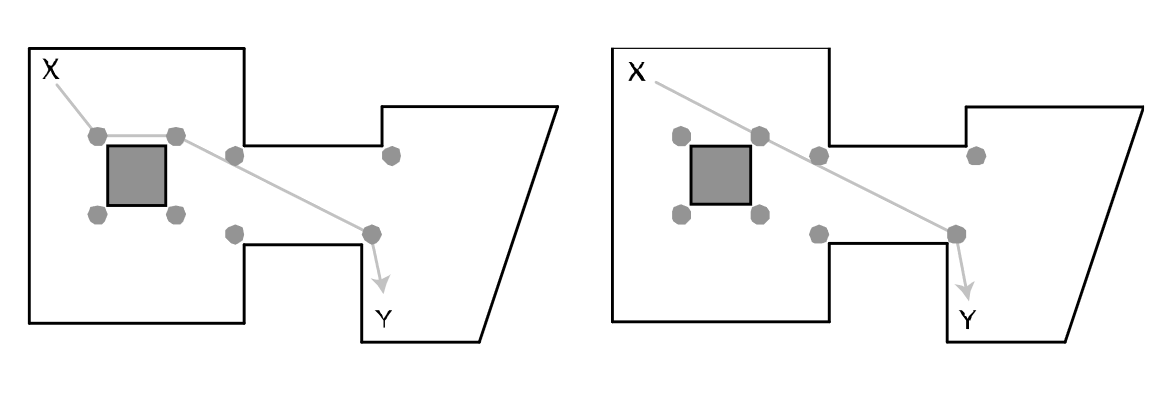
Waypoint graphs
Coner graphs
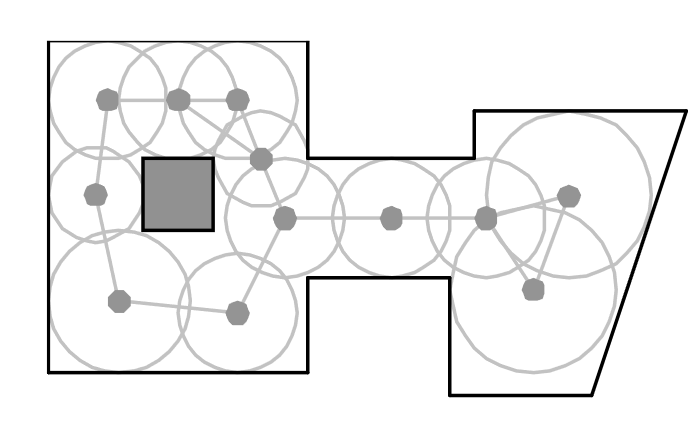
Circle-based waypoint graphs
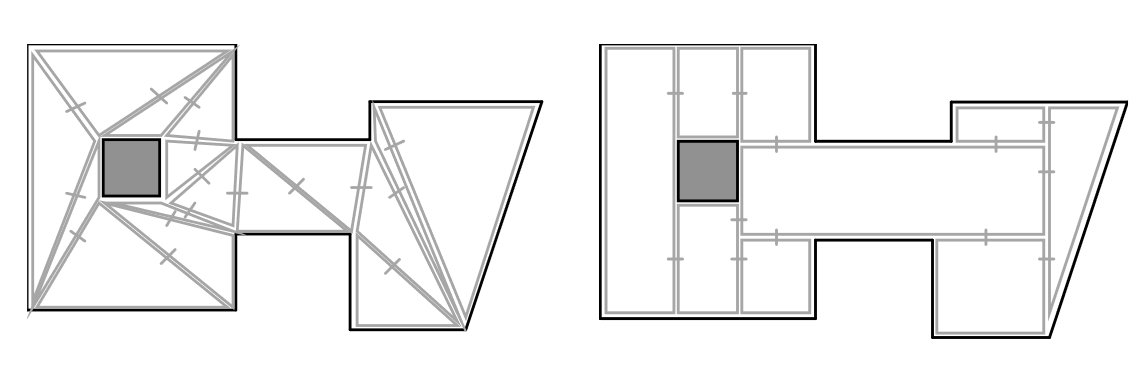
Navigation meshess
Path-Finding Search Algorithm
- Random Bounce
- Robust Trace
- BFS & DFS
- Dijkstra
- Greedy Best-First
- A*
- Jump Point Search
- Roy-Floyd-Warshall
탐색 알고리즘의 구조
OpenedList
방문한 적이 없는 노드 셋
ClosedList
이미 방문한 노드 셋
노드의 구조
struct Node
{
Node* parent;
float cost;
}
- 시작 노드를 OpenList에 추가
- While (OpenList not empty)
- OpenList에서 노드를 버퍼에 저장한 뒤 삭제
- 버퍼의 노드가 목적지라면 while 문 종료
- 아닌 경우 노드의 이웃들에 대한 이동 cost 측정
- 조건부로 OpenList에 이웃 노드를 추가
- 현재 노드를 ClosedList에 추가
Heuristics Calculation
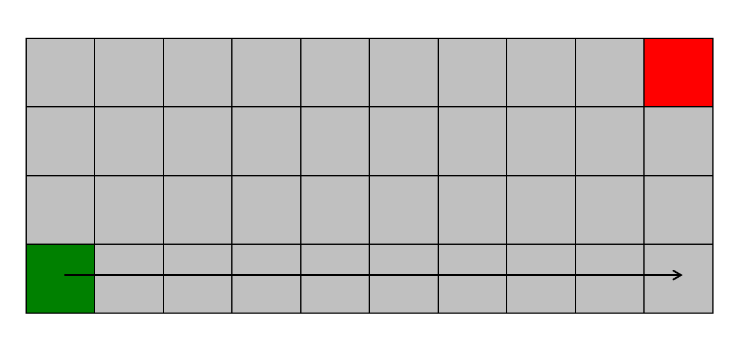
Manhattan distance
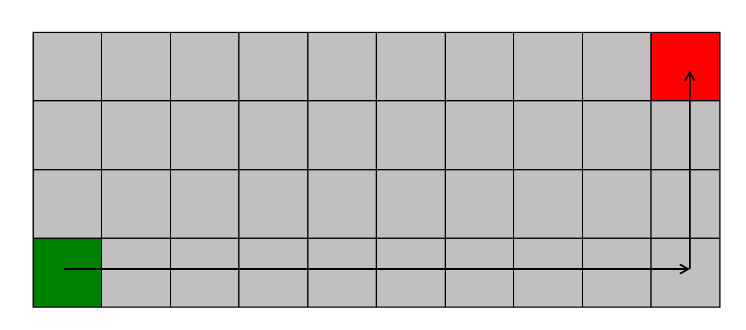
- xDiff + yDiff = 9 + 3 = 12
- 체스에서 거리를 정의할 때 이동
Chebyshev distance
- max(xDiff, yDiff) = max(9, 3) = 9
- 두 지점 사이의 벡터 값 중 가장 큰 값
- 체스에서 킹의 움직임을 정의할 때 이용
- 킹은 대각선 이동도 가능하므로, 이 경우를 커버하기 위함
Euclidean distance
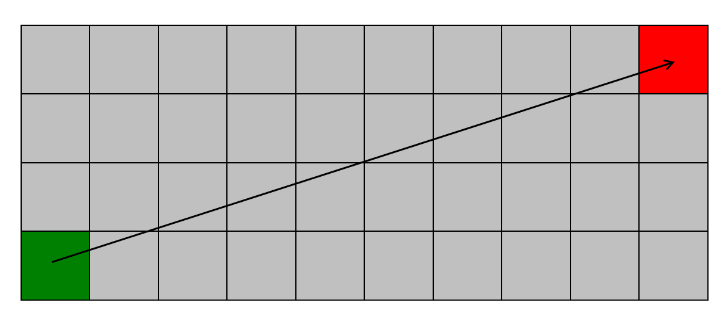
- sqrt(xDiff2 + yDiff2) = sqrt(92 + 32) = 9.48
- 두 지점 사이의 최단 거리를 측정
- Most optimal
Octile distance
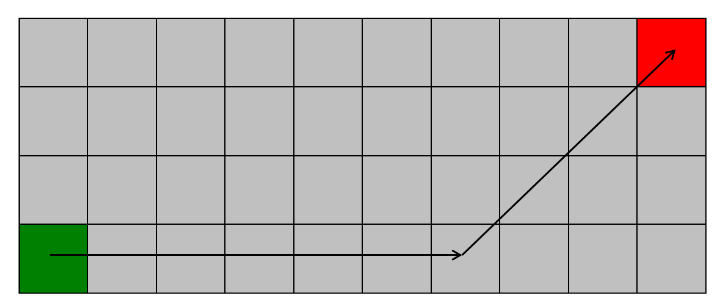
- min(xDiff, yDiff) * sqrt(2) + (max(xDiff, yDiff) – min(xDiff, yDiff))
- min(9, 3) * 1.41 + (max(9, 3) – min(9, 3)) = 10.24
- 경로 상의 Grid를 명확히 지정할 수 있음