Unreal Behavior Tree 1
Blackboard / Behaviour Tree / AI Controller / Pawn 의 관계
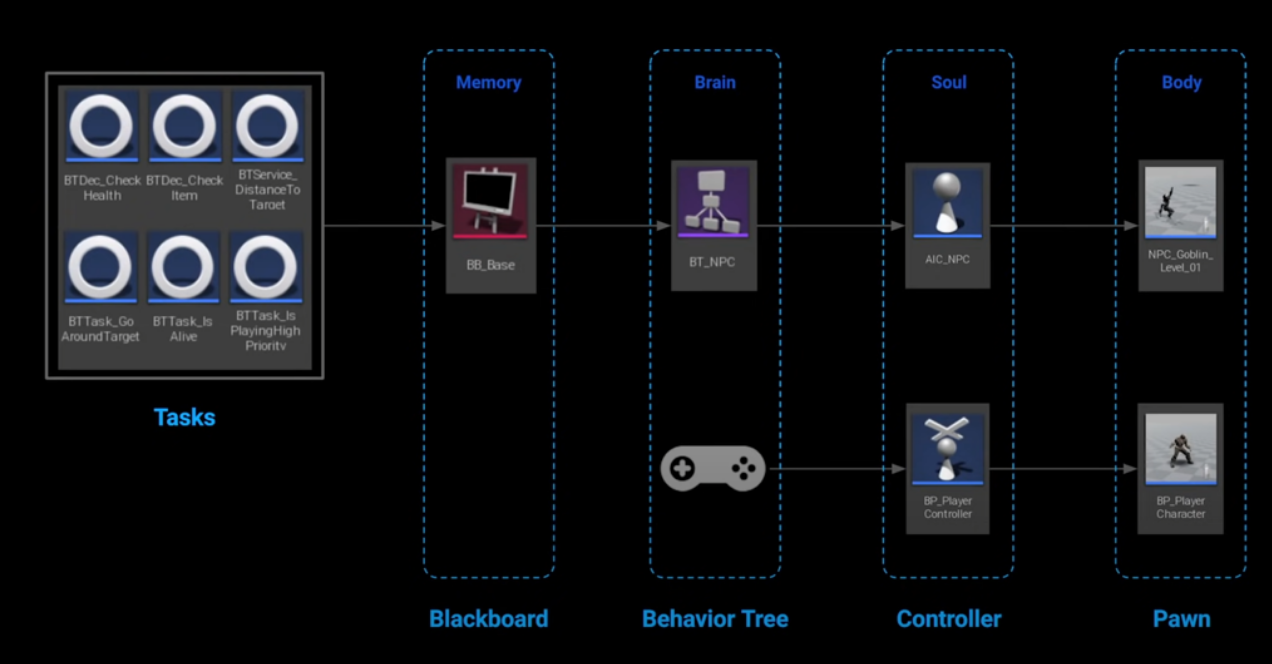
Pawn (usually Character)
- World에 존재하는 물리적 게임 오브젝트
Controller
- Pawn을 직접 조종하는 추상적 오브젝트
- Pawn의 행동 규칙을 정의
Behaviour Tree
- Controller를 통해 Pawn의 행동을 조종하는 뇌 역할
- Controller 안에서 작동하며, AI의 행동을 판단하는 Logic System
Blackboard
- Behaviour Tree가 행동을 판단하는 데 있어 필요한 정보들의 집합
- AI 객체마다 Instance로 보유
Character / AIController에 넣을 수 있는 데이터를 왜 굳이 Blackboard에 넣을까?
- 효율적인 Event-driven Behaviour
- Blackboard의 데이터를 변경하면서 Flow를 바꿀 수 있다는 점에서, 매 프레임 값의 변화를 확인하는 것보다 효율적
- BT Service에서 주로 Blackbaord의 값을 바꾸는데, Tick Interval을 조정할 수 있다는 말인 듯
- Blackboard의 데이터를 변경하면서 Flow를 바꿀 수 있다는 점에서, 매 프레임 값의 변화를 확인하는 것보다 효율적
- 연산 결과 캐싱
- 몇몇 데이터는 연산을 거쳐야 하며, 이를 반복하는 데 비용이 든다
- BT에 의해 사용할 연산 결과를 저장해주면 반복 연산을 할 필요가 없다
- Categorize하기 어려운 값들은 BT에서 쓸 목적이면 그냥 다 Blackbaord에 넣어두면 된다
- 데이터 중앙 집중화
- 여기저기 흩어두지 않고, BT에 쓸거면 그냥 한 곳에 모아두는 게 편하다
Behavior Tree
행동 트리는 AI가 현재 환경에서 어떤 행동을 할 지 결정하는 분기를 도식화한 것이다. 이는 각 개별 노드의 실제 작동 원리를 이해할 필요 없이, AI의 행동 플로우를 시각적으로 제공한다.
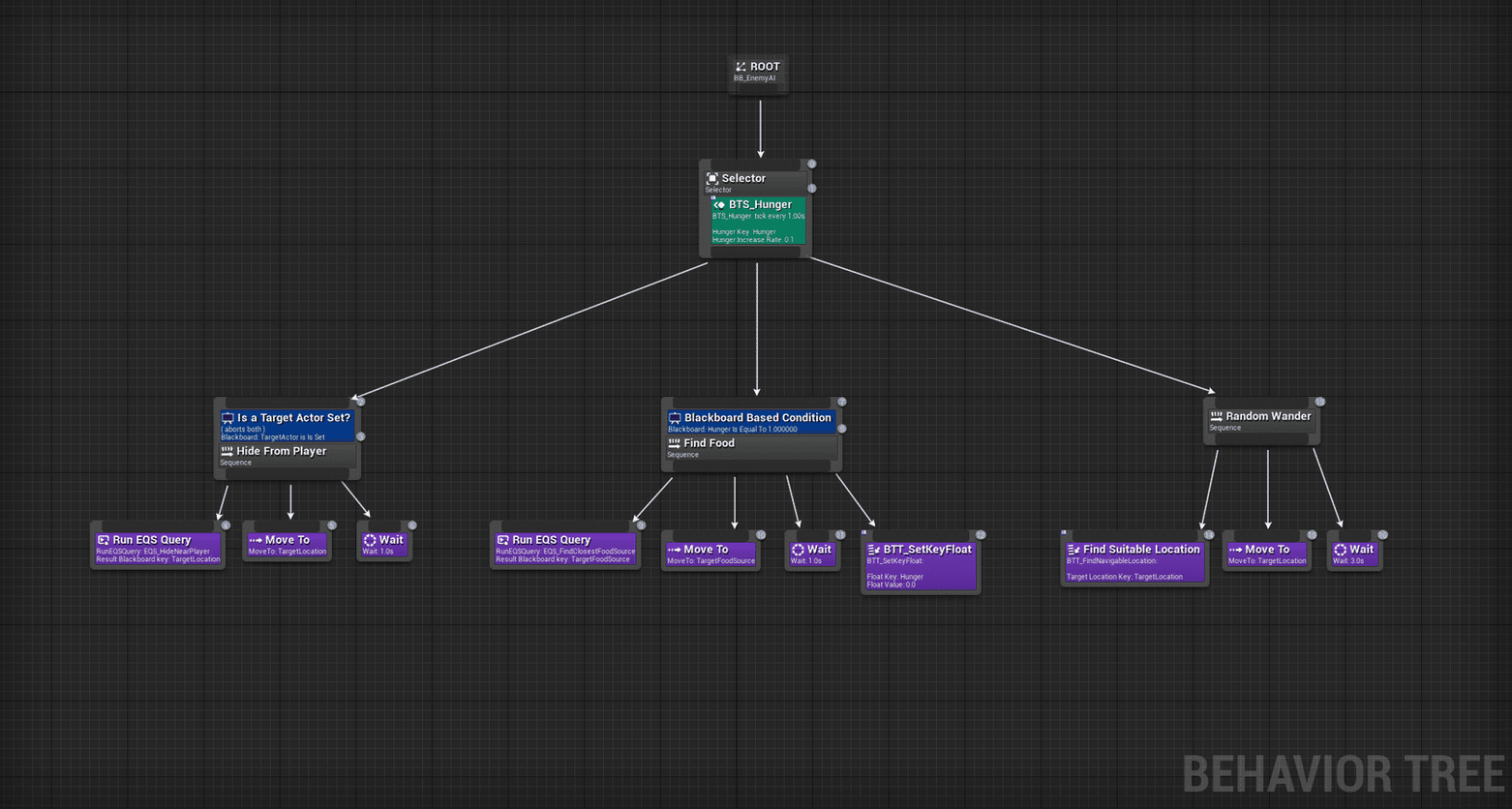
Behavior Tree의 작동 플로우?
각 노드의 위치는 BT가 진행하는 순서를 내포한다. 위에서 아래로 내려오고 왼쪽에서 오른쪽으로 진행한다. 기존의 BT 디자인은 매 Frame마다 Root에서 시작해 Recursive Search해 내려오는 플로우다 맞다. 그러나 최적화 차원에서 InProgress 등 반복 작업이 필요한 경우, Root에서 다시 시작하지 않고 그 Node에 머물러 있는 등 상태로 진행한다 이 경우, TickTask나 Event 등 수동으로 해제해줘야 한다
Tasks
Task Nodes
Task는 더 이상 하위 노드를 가질 수 없는 최하위 노드다.
Task Statuses
각 Task Node는 Succeeded, Failed, InProgress의 3개 상태 중 하나를 반드시 반환한다.
Suceeded와 Failed는 다음 노드로 이동하여 진행하도록 하지만, InProgress는 BT의 진행을 이 노드에서 멈추게 한다. 이 경우 다른 방법으로 노드의 Status를 변경해 BT가 다시 진행할 수 있도록 풀어줘야 한다.
Composites
일반적인 BT 구조상 Root Node는 Composite이다. 여러 Task Node를 순서대로 실행할 수 있는 분기점 역할을 한다. Task Node처럼 특정 Action을 수행하지는 않는다. 다만 하위 Task Node의 Status에 따라 BT 흐름을 통제한다.
Selector
하위 Task Node 중 Succeeded를 반환하면 그 즉시 Succeeded를 반환하고, 그 이후에 Task Node가 있더라도 더 이상 진행하지 않는다. 즉, 여러 하위 Task Node를 거치면서 Failed면 진행하고, Succeeded면 멈춘다.
여러 선택지 중 하나를 실행할 때 사용한다.
Sequence
하위 Task Node 중 Failed를 반환하면 그 즉시 Failed를 반환하고, 그 이후에 Task Node가 있더라도 더 이상 진행하지 않는다. 즉, 여러 하위 Task Node를 거치면서 Succeeded면 진행하고, Failed면 멈춘다.
일련의 Action이 모두 성공해야 할 때 사용한다.
Simple Parallel
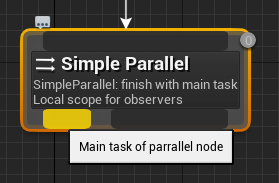
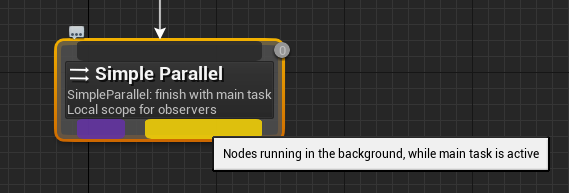
메인 Task Node 하나를 서브트리와 병행 실행시킬 수 있다. 좌측 메인 Task Node가 실행을 완료하면 Config에 따라 우측의 서브 트리도 강제로 종료할 지, 아니면 완료할 때까지 대기할 지를 결정한다.
왜 단순 반복 Composite은 없을까?
Decorator 중 Force Success 노드를 하위 Task Node의 Decorator로 추가하고 상위 Composite을 Sequence로 하면 가능할 것 같긴 하다.
출처
- https://dev.epicgames.com/community/learning/courses/67R/unreal-engine-introduction-to-ai-with-blueprints/qzZ2/behavior-tree-theory
- https://docs.unrealengine.com/5.1/ko/unreal-engine-behavior-tree-node-reference-composites/
- https://www.youtube.com/watch?v=iY1jnFvHgbE
- https://forums.unrealengine.com/t/blackboard-documentation/1795